|
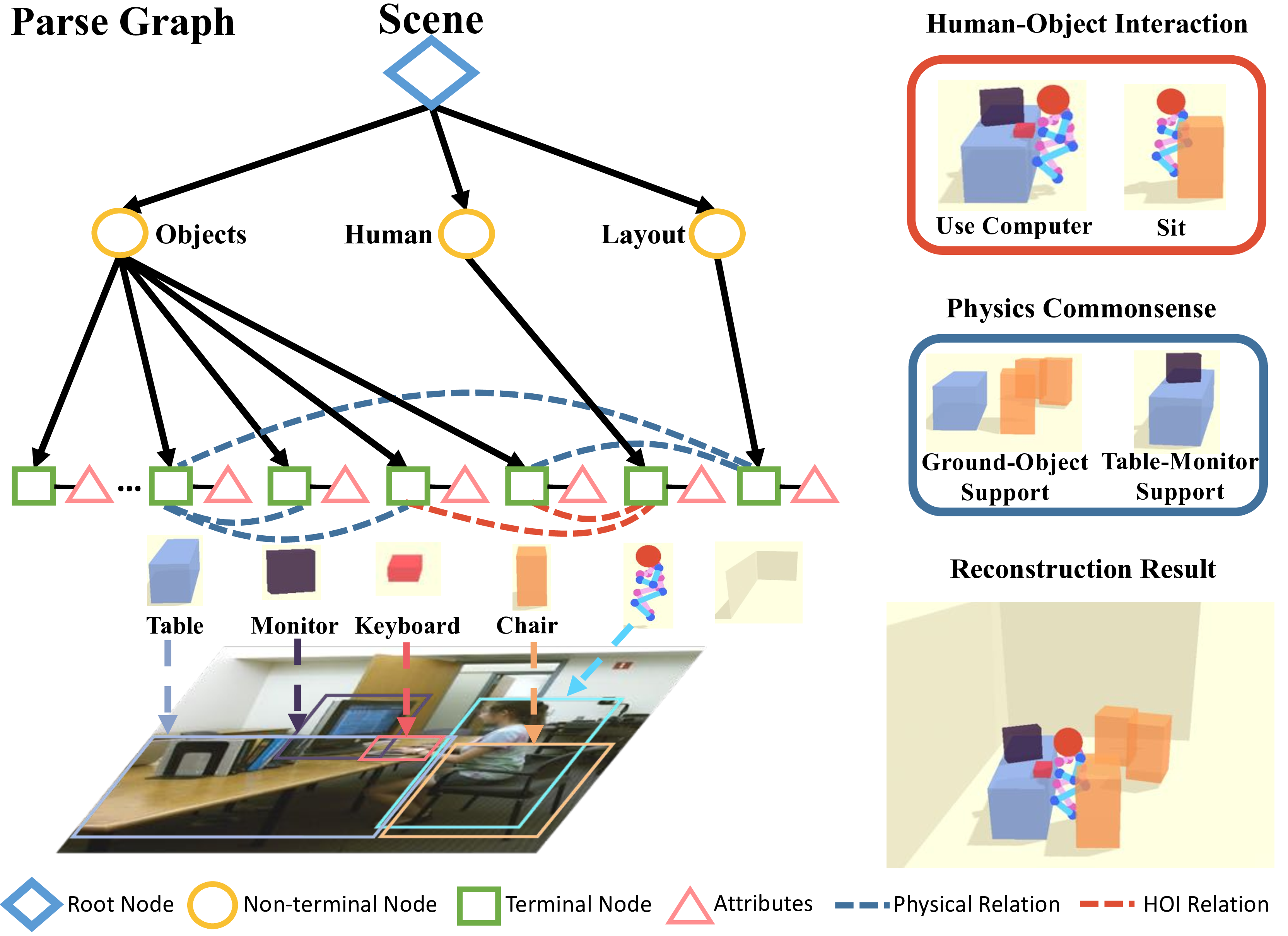
Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and Human Pose Estimation with Human-Object Interaction and Physical Commensense |
|
Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and Human Pose Estimation with Human-Object Interaction and Physical Commensense |

1 Department of Statistics, UCLA
2 Department of Computer Science, UCLA
@inProceedings{chen2019holisticpp,
title={Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and Human Pose Estimation with Human-Object Interaction and Physical Commonsense},
author = {Chen, Yixin and Huang, Siyuan and Yuan, Tao and Qi, Siyuan and Zhu, Yixin and Zhu, Song-Chun},
booktitle={The IEEE International Conference on Computer Vision (ICCV),
year={2019}
}